SLAM 公开课笔记 3:地图
这一周的内容和地图有关,最后的作业就是通过传感器的数据创建一个地图。
地图类型
常见的题目类型有三种:
- 度量地图 (Metric Map):地点用坐标表示,例如用经纬度表示地点的世界地图。
- 拓扑地图 (Topological Map):表示地点之间的逻辑关系,例如图论中图的概念,以及地铁图。
- 语义地图 (Semantic Map):用标签描述的地图,通过位置关系描述被标记的地点,例如景点游览图。
在现实中绘制地图有几个难点,一是测量误差会导致坐标不精确,二是设备本身需要不断地移动才能绘制,三是地图本身是对现实世界的反应,会不断的变化。
占据栅格地图 (Occupancy Grid Map)
栅格地图用二维栅格表示整个环境,每个栅格都有一个概率值表示这个栅格是否有物体存在。绘制栅格地图常用的设备之一是测距传感器,通过发出激光并测量接受反射所用的时间,传感器可以了解前方障碍物的大致距离。
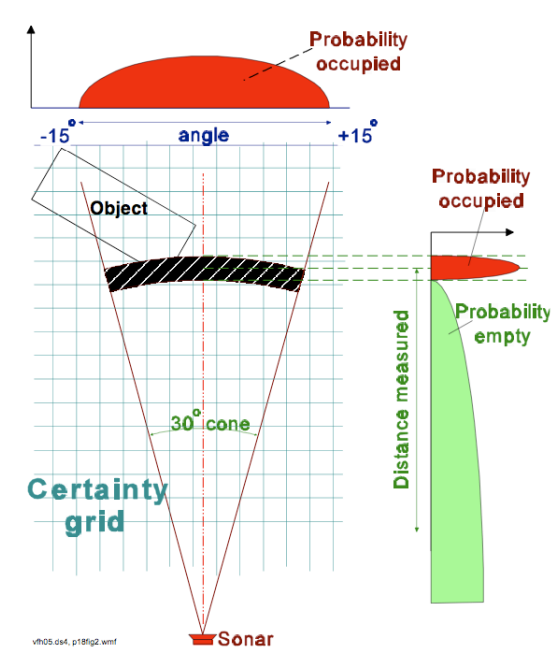
如图所示,传感器本身测量存在误差,我们只能认为在传感器正前方给定距离处有一定几率存在障碍物。对于这种测量有误差的环境,我们再次引入贝叶斯模型描述。记 \(p(m_{x, y})\) 为 (x, y) 格中存在障碍物的概率的先验知识,根据测量的设备模型我们可以得到条件概率 \(p(z | m_{x,y})\)。\(p(z=1|m_{x,y}=1)\) 就代表栅格中有障碍物,且检测成功的概率,而 \(p(z=1|m_{x,y}=0)\) 则代表栅格中不存在障碍物,但是却检测到障碍的概率(假阳性)。
根据贝叶斯公式,我们可以得到测量之后的后验概率 \[ p(m_{x,y}|z) = \frac{p(z | m_{x,y}) p(m_{x,y})}{p(z)} \] 为了简化计算,引入 \(Odd(X) = \frac{p(X)}{p(\neg{X})}\) ,则有 \[ Odd(m_{x,y} = 1 | z) = \frac{p(m_{x,y} = 1 | z)}{p(m_{x,y} = 0 | z)} = \frac{p(z | m_{x,y} = 1) p(m_{x,y} = 1)}{p(z | m_{x,y} = 0) p(m_{x,y} = 0)} \] 其中最后一步可以代入贝叶斯公式得到。对 \(Odd\) 求对数,则有 \[ \begin{align} \log \frac{p(m_{x,y} = 1 | z)}{p(m_{x,y} = 0 | z)} &= \log \frac{p(z | m_{x,y} = 1) p(m_{x,y} = 1)}{p(z | m_{x,y} = 0) p(m_{x,y} = 0)} \\ &= \log \frac{p(z | m_{x,y} = 1)}{p(z | m_{x,y} = 0)} + \log \frac{p(m_{x,y} = 1)}{p(m_{x,y} = 0)} \end{align} \] 令 \(\log{odd\ meas}\) 表示 \(\log \frac{p(z | m_{x,y} = 1)}{p(z | m_{x,y} = 0)}\) ,上式可以简化为 \[ \log odd(m_{x,y} = 1 | z) = \log{odd\ meas} + \log odd(m_{x,y} = 1) \] 如果用 \(\log{odd}\) 表示栅格的状态,这一状态可以简单的通过加减来维护。当检测到障碍物时,该栅格的 \(\log{odd}\) 增加 \(\frac{p(z=1 | m_{x,y} = 1)}{p(z=1 | m_{x,y} = 0)}\),没有检测到障碍物时,该栅格的 \(\log{odd}\) 减少 \(\frac{p(z=0 | m_{x,y} = 0)}{p(z=0 | m_{x,y} = 1)}\)。初始状态为 0,即 \(odd = 1\)。
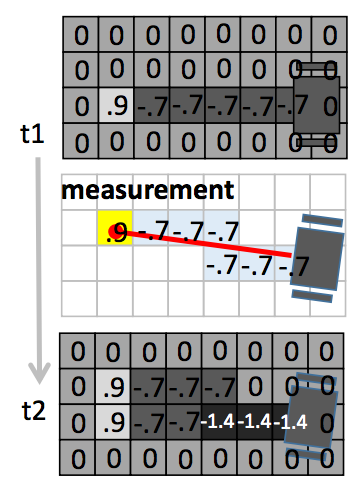
下图为一个具体的例子,第一个栅格地图为 t1 时刻的状态,做了一次探测后,经过的空闲栅格的 \(\log{odd}\) 减少 0.7(这个值由传感器决定),而最后的障碍物所在格的 \(\log{odd}\) 增加了 0.9。第三个栅格地图为 t2 时刻更新后的状态。
三维地图
常见的三维传感器:
- 三维测距传感器 (如 Lidar)
- 双目相机 (Stereo Camera)
- 深度相机 (Depth Camera)
地图的数据格式也有多个方案:
- 栅格表示:查询单个栅格的状态非常快,但是占用大量内存,而且因为离散化一部分信息会丢失。
- 列表表示:节省了内存,也不会因为离散化丢失信息,但是查询时需要线性扫描。
- 树状表示:查询比列表快 (O(logN)),同时内存占用不大。
- k-d tree:每次选择一条坐标轴,把空间对半分。查询和维护都能在 O(log n) 内完成。
- octree:把空间均等分成八块,在存在点的分块中继续递归细分。
作业
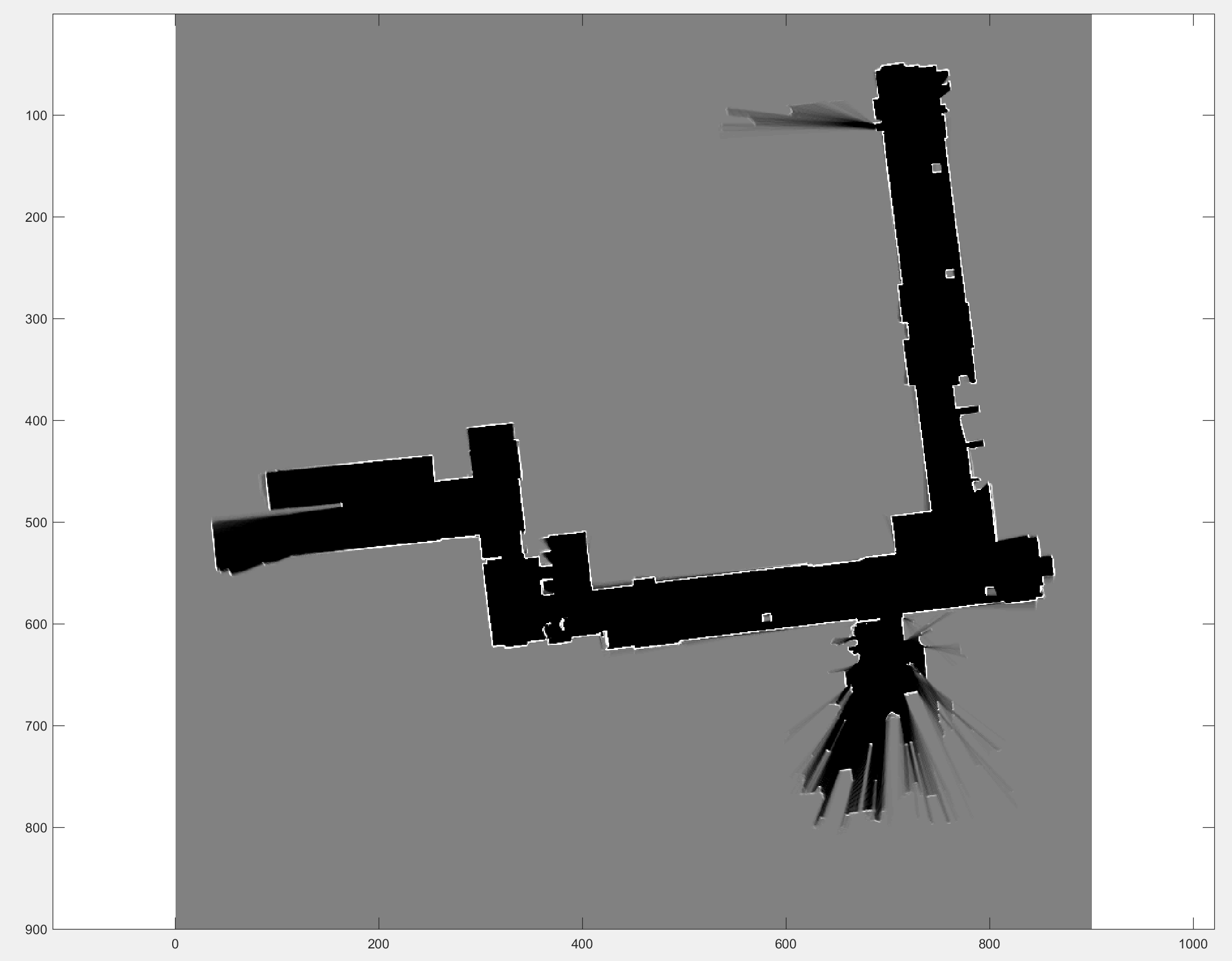
这次的作业是根据一组 Lidar 测量结果绘制一个二维地图。输入包含四个参数(这里 K 为扫描总次数,N 为 Lidar 光线数):
- t 数组记录每组数据的时间点,大小为 \(1 \times K\)。
- ranges 数组记录每次测试各条激光线测得的距离,大小为 \(N \times K\)。
- scanAngels 数组记录每条激光线相对机身的转角,大小为 \(N \times 1\),每次测试时这个转角不会变化。
- pose 数组记录每次测试时机器人在地图中的位置,大小为 \(3 \times K\),三行数据分别是坐标 x y 和相对地图的转角。
我实现的方法没有用向量并行,用了两层循环依次处理每次测试的各条光线。在 i7 6700K 上大概 25 秒可以跑完最终测试,测试程序里会提到整个过程可能要五分钟,性能差一点的机器这个时间里面应该也能跑完了。
最后跑地图的时候,注意 example_test.m 里传给 occGridMapping 的参数只取了前 1000 次测量结果,所以要制作完整地图要把这个限制去掉。另外文档里面坐标转换时用了 ceil,我在本地测试时只能拿到 27/30 分,换成 round 就能到满分了。
全课程的笔记链接
- Robotics Estimation and Learning 的课程主页
- 第一周笔记:高斯分布
- 第二周笔记:卡尔曼滤波
- 第三周笔记:地图
- 第四周笔记:定位